| 压力增强系数 i | 压力增强后最大 出口流量 l/min | 最大 入口流量 l/min |
|---|---|---|
| 1.3 | 16.3 | 40.0 |
| 1.5 | 14.1 | 40.0 |
| 1.8 | 11.8 | 40.0 |
| 2.1 | 10.1 | 40.0 |
| 2.6 | 8.1 | 40.0 |
| 2.8 | 7.6 | 40.0 |
| 3.2 | 6.5 | 40.0 |
| 4.3 | 5.0 | 40.0 |
| 5.1 | 4.1 | 40.0 |
| 6.3 | 3.4 | 40.0 |
| 9.8 | 2.2 | 40.0 |
功能图中说明了基本操作。油通过连接板输送到控制阀,再输送到 HC4-NG 的 IN 端口,自由流过止回阀 KV1、KV2 和 DV,到达高压侧 H。
从高压侧 H,油被输送到连接板上的端口 A。在这种情况下,通过增压器可实现最大流量,从而提供快进功能。当高压侧 H 达到泵压时,阀门 KV1、KV2 和 DV 将关闭。最终压力将由振荡泵单元 OP 实现。当高压侧达到最终压力时,该单元将自动停止。如果由于消耗或泄漏导致高压侧压力下降,OP 阀将自动运行以保持最终压力。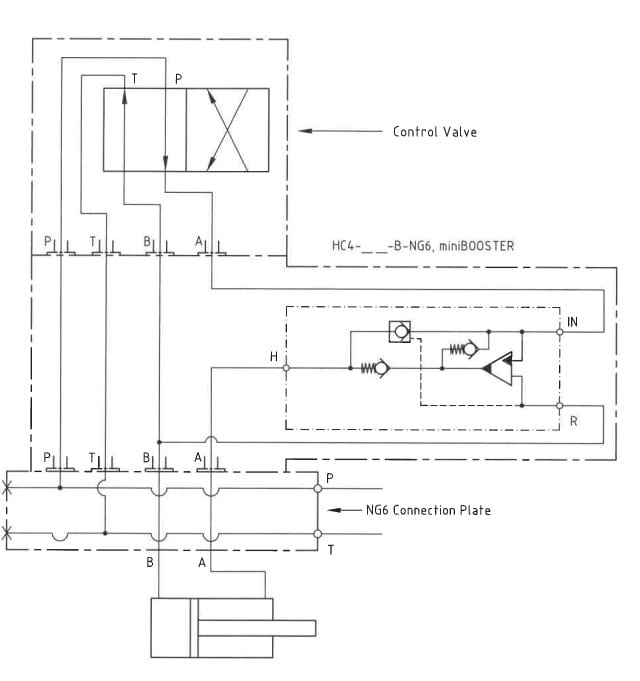
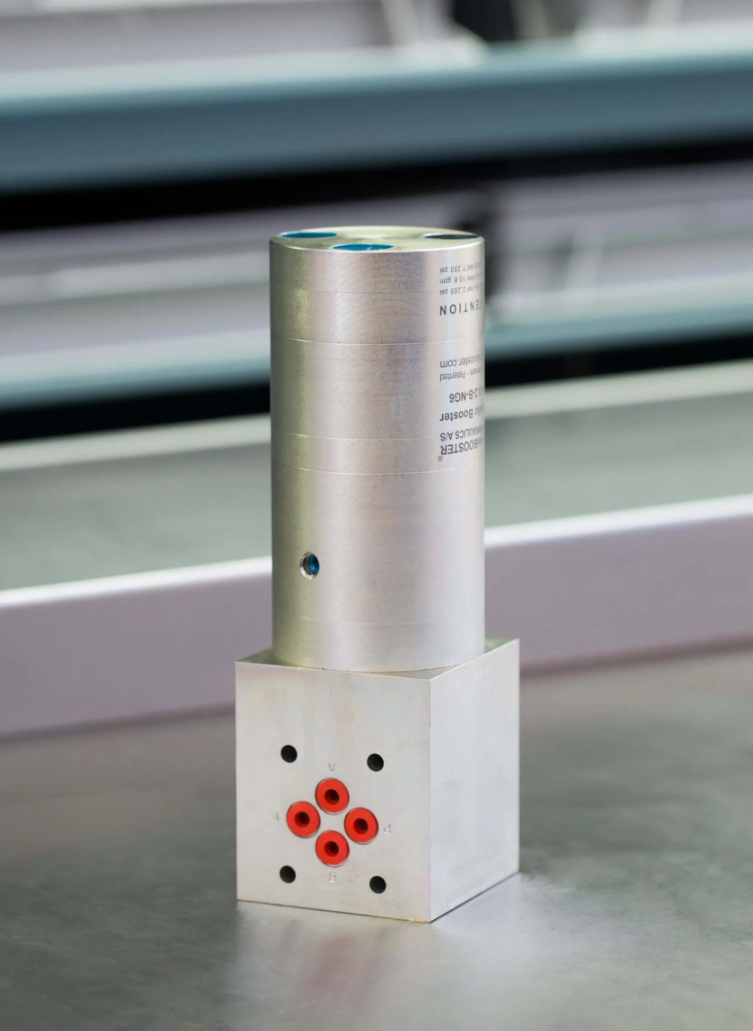
HC4 – NG(i = 4.3、集成 DV 和 NG6 (D03) 歧管)的订购示例:HC4 – 4.3 – B – NG6
型号
HC4
G 版本 有2 种变体,订购时请相应指定:
动态 - 低滞后:订购 i = 4.3 RV 的 HC4-NG 示例和 NG6 (D03) 歧管:HC4 – 4.3 – G – NG6
故障安全 – 高滞后:RV(比例控制) 阀门开启比应根据具体情况确定。请联系我们的技术支持。
订购示例:HC4-NG,i = 4.3 RV,开启比 xx,集成 NG6 (D03) 歧管:HC4 – 4.3 – G – xx – NG6
动态 - 低滞后 是指设备或系统在动态操作过程中,其输出与输入之间的滞后效应较小,即系统的输出能够迅速跟随输入的变化,而不会产生显著的滞后或延迟。滞后现象通常发生在具有记忆效应的材料或系统中,在受到外部激励后,其响应会存在一定的时间延迟和滞后效应。在控制系统:在自动控制系统和伺服系统中,低滞后现象可以提高系统的响应速度和稳定性,确保系统能够快速准确地跟踪目标。
故障安全 - 高滞后 是指在发生故障时确保系统或设备的可靠性和安全性的设计功能。
故障安全表示系统在发生故障时会自动切换到安全状态,而高滞后则是指触发动作的阈值与反转该动作的阈值之间的差值
RV阀门的开启比 是 指阀门开启所需的压力与负载压力之间的比例关系。
例如,如果阀门的开启压力设定为2.5MPa,控制口的控制压力为2.5MPa时可以使阀开启,而当控制口不提供压力时,负载压力需要达到7.5MPa才能使阀门开启,则开启比为3:1